What Are Autonomous Mobile Robots?
Warehouses, logistical companies, agriculture businesses, and healthcare institutions are all looking for new and innovative ways to improve operational efficiency, enhance speed, ensure precision, and increase safety. Many are turning to autonomous mobile robots (AMRs) for help.
An autonomous mobile robot is a type of robot that can understand and move through its environment independently. AMRs differ from their predecessors, autonomous guided vehicles (AGVs), which rely on tracks or predefined paths and often require operator oversight.
AMRs use a sophisticated set of sensors, artificial intelligence, machine learning, and compute for path planning to interpret and navigate through their environment, untethered from wired power. Because AMRs are equipped with cameras and sensors, if they experience an unexpected obstacle while navigating their environments, such as a fallen box or a crowd of people, they will use a navigation technique like collision avoidance to slow, stop, or reroute their path around the object and then continue with their task.
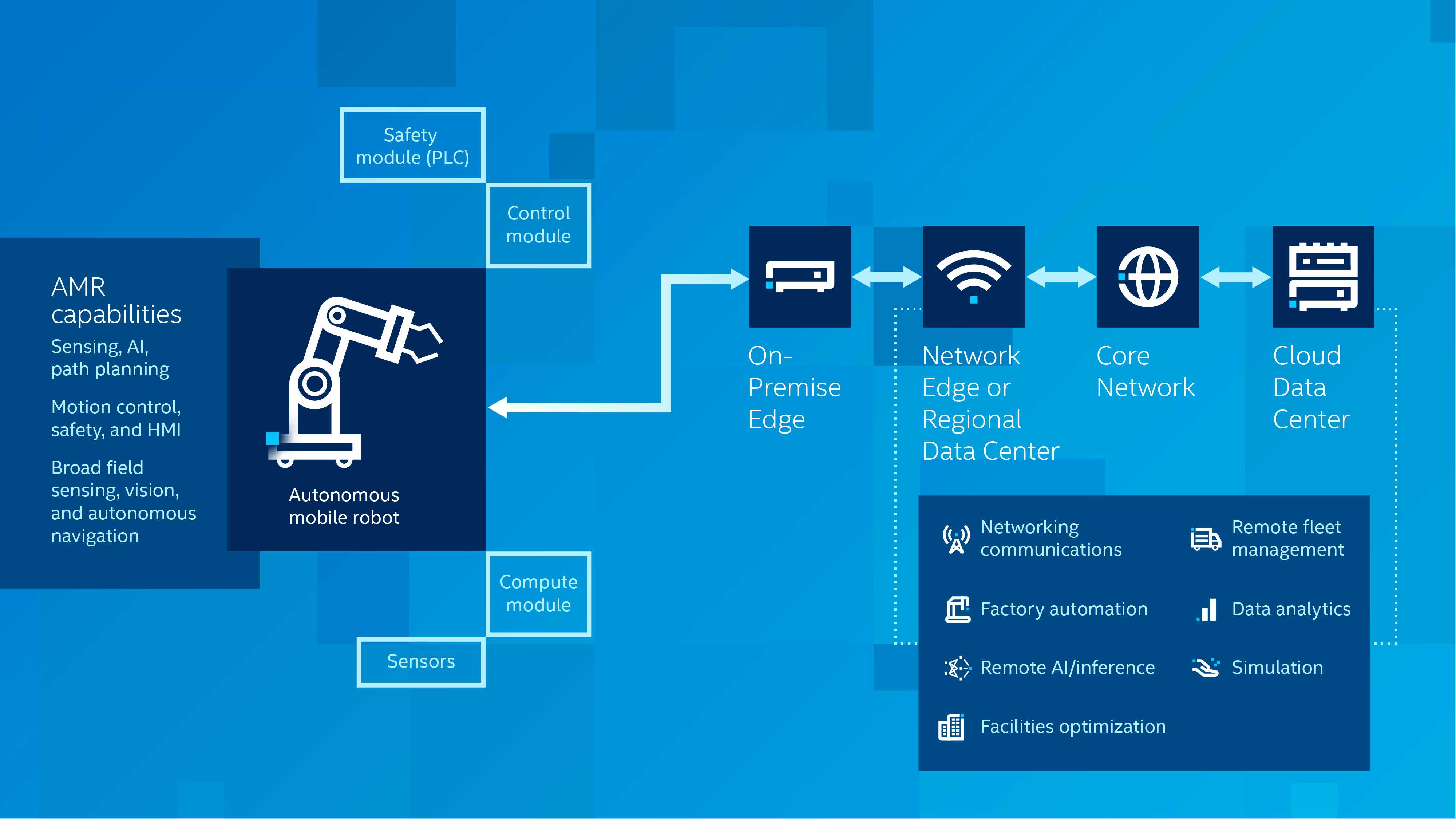
Autonomous Mobile Robot Components and Architecture
Explore the diagram below to learn how system components work together to enable AMRs.
{kind=link}
Why Adopt Autonomous Mobile Robots?
Enhanced Safety for Workers
Many businesses use AMRs for tasks that would be harmful to or not possible for human workers. For example, they may be used to clean and disinfect areas for improved health and safety, transport contagious laboratory specimens in hospitals, carry heavy loads in industrial environments, or work in extreme conditions where humans cannot and should not be working.
Increased Flexibility
AMRs dynamically assess and respond to their surroundings while completing a variety of tasks—all without the direct supervision of an operator. Simultaneous location and mapping (SLAM) solutions and advanced mapping technology enable AMRs to understand and adjust to changes in their environment. This flexibility makes them a valuable tool that can be used across applications and industries.
Improved Efficiency and Productivity
To enable employees to focus on high-value activities, such as customer support, businesses often use AMRs to assist with locating, picking, and moving inventory. When productivity is key, many businesses turn to low-powered AMRs that require less energy to function. Less power to operate means AMRs can recharge and return to work quicker, reducing downtime and keeping production and fulfillment going.
AMRs in Action
Discover the revolutionary ways forward-thinking companies are incorporating AMRs into their businesses and learn about the business-changing benefits they’re realizing.
Boosting Operational Efficiency with Accelerated Development and Deployment of AMRs
Learn how AAEON’s UP Squared RoboMaker Pro Kit is making development and deployment of AMRs faster and easier with all of the integrated, prevalidated hardware and software components you need—including Intel® RealSense™ cameras for 3D vision and even motors and wheels—in one box.
Assisting Hospitals with Faster, More-Effective Sanitization
Find out how Irish start-up Akara uses Intel® technologies to power intelligent, germ-killing autonomous mobile robots.
Improving the Customer Experience with Mobile Delivery Solutions
Discover how Intel® RealSense™ depth-sensing technology guides Aethon robots to autonomously deliver items to make guest experiences more memorable—from room service to food and banquet supplies to linens.
Industry Applications for AMRs
Manufacturing, Warehousing, and Logistics
Autonomous mobile robots are quickly becoming a valuable part of manufacturing, warehouses, and logistics businesses because of their versatility and ease of integration into existing infrastructures. They can be used to perform heavy- and light-duty tasks, deliver items to human employees, and carry out safety and security checks.
Healthcare
Healthcare providers rely on AMRs for critical needs such as disinfection, telepresence, and delivery of medication and medical supplies, creating safe environments for all while freeing up staff to spend more time with patients.
Retail, Banking, and Hospitality
Retailers, banks, and hospitality companies are using AMRs to streamline and enhance the customer experience—from customer service to inventory automation, room service, luggage assistance, and way finding.
Smart Cities and Public Sector
Innovative cities and government agencies across the globe are taking advantage of all AMRs have to offer. Smart cities are leveraging them to improve residential services, such as trash removal or public transportation, and public agencies are using AMRs for safety and security, search and rescue missions, and space exploration.
Agriculture
To keep up with the projected population growth by 2050, the world will need to produce 50 percent more food than it does now.1 To make that a reality, agricultural companies are seeking the help of AMRs to overcome significant labor shortages, boost productivity, and improve yields.
Supporting AMRs at the Edge
Intel offers the edge-ready compute, connectivity, real time, manageability, security, AI, and storage technologies and solutions you need to get your AMRs up and running smoothly on the factory floor, in the farm field, or wherever you choose to deploy.
Edge Insights for AMR
See how you can easily develop, build, and deploy end-to-end mobile robot applications with our purpose-built, open, and modular software development.
Intel® RealSense™ Products
Discover the robust range of depth cameras that enable AMRs to perceive and adapt to their surroundings, enabling capabilities like collision avoidance and occupancy mapping.
Intel® Edge Software Hub
Get access to free, customizable and deployment-ready software packages, reference implementations, and an array of resources and tools designed to help you accelerate the development and deployment of edge computing solutions.
Intel® DevCloud for the Edge
Test Intel® hardware before you buy. This online sandbox includes the latest release of the Intel® Distribution of OpenVINO™ toolkit, Intel® Deep Learning Workbench, and our latest CPUs, GPUs, VPUs, and FPGAs.
Intel® Distribution of OpenVINO™ Toolkit
Access essential tools and pre-built components to streamline development of AI inference capabilities for AMRs.
Are You Building Robot Solutions?
Check out our growing catalog of partner offerings to build end-to-end solutions. From robot to edge to cloud, we have offerings that include robotics development kits, software, and hardware components.
Frequently Asked Questions
An autonomous mobile robot (AMR) is a type of robot that can understand and move through its environment without being overseen directly by an operator or limited to a fixed, predetermined path. All AMRs begin with a mobile platform, and many come with passive or active attachments or manipulators to accomplish an assortment of tasks. Wheeled AMRs, untethered from wired power and data, navigate using cameras, sensors, artificial intelligence, and machine vision.
One example of an autonomous mobile robot is a pick-and-place AMR that’s commonly used in warehouses. This AMR uses machine vision technology to identify, grab, and move objects from one location to another while avoiding obstacles. Another example of an AMR is one that transports medicine or supplies in a hospital. This AMR helps automate the distribution of medicine by taking assignments, picking up medications, and delivering them to the correct patients throughout the hospital.
Autonomous mobile robots (AMRs) use cameras, sensors, artificial intelligence, and machine vision to independently navigate through uncontrolled environments to complete a variety of tasks. Autonomous guided vehicles (AGVs) follow a track or predefined route to complete automated, repetitive tasks and are often overseen by a human operator. Remotely operated underwater vehicles (ROVs) are deployed to complete deep-water tasks while being tethered to and operated by a crew located on a floating platform or land. ROVs can be fitted with equipment such as a robotic arm, camera, lights, or sensors to enhance its capabilities.